
Мощность генератора на заряд аккумуляторов
Зная напряжение генератора и его сопротивление можно вычислить ток заряда аккумулятора, ну если перемножить ток на напряжение то мы получим мощность. Напряжение генератора мы знаем, при соединении звездой напряжение 10 вольт. А сопротивление можно вычислить, у нас по 60 витков в катушках, по три катушки на фазу, средняя длина витка 0.3 метра, значит 0.3*60*3= 54 метра провода в фазе. Провод диаметром 2 мм, сопротивление одного метра такого провода 0.0059 Ом. Тогда 54*0.0059=0.31 Ом, а при соединении звездой сопротивление будет выше в два раза — 0.62 Ом. Плюс потери в проводах и на диодном мосту и можно округлить до 1 Ом, но потери могут быть гораздо больше. Правильней будет считать измерив сопротивление уже внизу на концах проводов, которые подключаются к АКБ. Чтобы вычислить ток заряда АКБ нужно от напряжения холостого хода вычесть падение напряжения. Например напряжение генератора при 300 об/м 40 вольт, при подсоединении к АКБ напряжение упадёт до 13 вольт, значит падение напряжения 40-13=27 вольт.Далее получившеюся сумму разделить на сопротивление генератора, и получится ток заряда АКБ.
У нашего генератора 20 вольт при 200 об/м, 20-13=7 вольт, делим на наше сопротивление 1 Ом, и получится 7:1=7 ампер. Ток заряда при 200 об/м будет 7 Ампер. Чтобы узнать мощность перемножаем ток на напряжение и получаем 7*13 = 91 ватт. Так например при 600 об/м будет 100 вольт в холостую, 100-13:1= 87 Ампер, а мощность 1131 ватт. Если от ветрогенератора до АКБ будут установлены провода с очень низким сопротивлением приближающимся к нулю то от генератора будет ещё больше мощности так-как потерь меньше.
Далее остаётся подобрать подходящий под генератор винт, нужно чтобы винт подходил по мощности и оборотам к генератору. По-этому делается предварительный расчёт генератора и подбор винта к нему. Данные по мощности и оборотам винтов можно взять на сайте seiger.pp.ua (аэродинама), или в программе по расчёту лопастей из труб. Так например к этому генератору подойдет винт диаметром примерно 3 метра, и мощность готового ветряка будет около 0.8кВт при ветре 10-12м/с. При этом КИЭВ винта должен быть не менее 0.4, а быстроходность не менее Z6.
Если вам не нравится что например или зарядка поздно начинается или перебор по мощности, то изменяйте количество витков в генераторе, его сопротивление, подгоняйте под винт. Ну и винт корректируйте под генератор. В итоге когда устроят все параметры то можно приступать к изготовлению ветрогенератора. Также хочу отметить что при подборе винта учтите КПД генератора. Чем больше падение напряжения при заряде АКБ тем хуже КПД генератора.
Классификация МПТ по способу питания обмоток индуктора и якоря
По данному признаку МПТ делятся на 4 вида.
С независимым возбуждением
Обмотки индуктора и якоря не имеют электрического соединения. У генераторов этого типа обмотку возбуждения питает сеть постоянного тока, аккумулятор или специально предназначенный для этого генератор — возбудитель. Мощность последнего — несколько сотых мощности основного генератора.
 Область применения генераторов с независимым возбуждением:
Область применения генераторов с независимым возбуждением:
- системы значительной мощности, где напряжение на обмотке возбуждения существенно отличается от генерируемого;
- системы регулирования скорости вращения двигателей, запитанных от генераторов.
У двигателей с независимым возбуждением запитана и якорная обмотка. В основном это также агрегаты большой мощности.
Независимость обмотки индуктора позволяет удобнее и экономичнее регулировать ток возбуждения. Еще одна особенность таких моторов — постоянство магнитного потока возбуждения при любой нагрузке на валу.
С параллельным возбуждением
Обмотки индуктора и якоря соединены в одну цепь параллельно друг другу. Генераторы этого типа обычно применяются для средних мощностей. При параллельном соединении генерируемое устройством напряжение подается на обмотку возбуждения. При соединении в одну цепь обмоток индуктора и якоря говорят о генераторе с самовозбуждением.
По своим характеристикам они идентичны моторам с независимым возбуждением и обладают следующими особенностями:
- при изменении нагрузки частота вращения практически не трансформируется: замедление составляет не более 8% при переводе от холостого хода к номинальной нагрузке;
- можно с минимальными потерями регулировать частоту вращения, причем в широких пределах — 2-кратно, а у специально сконструированных моторов и 6-кратно.
Индуктор вращающегося двигателя с параллельным возбуждением нельзя отсоединять от цепи якоря, даже если он уже отключен. Это приведет к наведению значительной ЭДС в обмотке возбуждения с последующим выходом мотора из строя. Находящийся рядом персонал может получить травму.
С последовательным возбуждением
Обмотки соединены в цепь последовательно друг другу. Через обмотку возбуждения течет ток якоря. Генераторы этого типа почти не применяются, поскольку процесс самовозбуждения происходит достаточно бурно и устройство не способно обеспечить необходимое большинству потребителей постоянство напряжения. Их используют только в специальных установках.
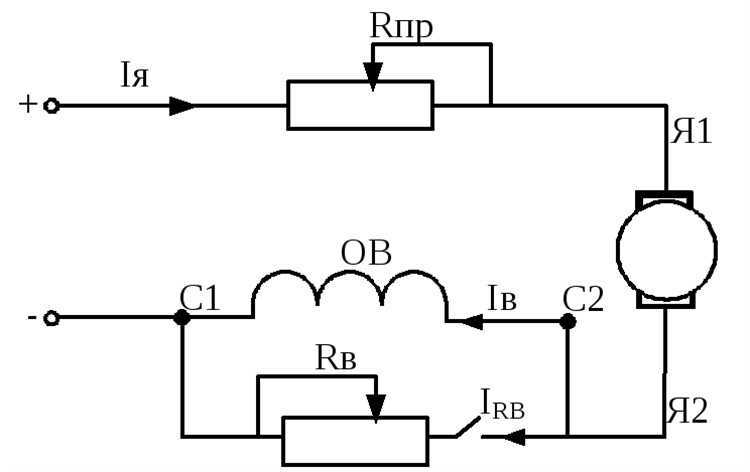
Схема последовательного возбуждения
Двигатели этого типа широко применяют в качестве тяговых (электровозы, троллейбусы, краны и пр.): по сравнению с аналогами параллельного возбуждения, при нагрузке они дают более высокий момент с одновременным уменьшением скорости вращения. Пусковой момент также высок.
Запуск двигателя с нагрузкой ниже 25% номинальной, а тем более на холостом ходу, недопустим: частота вращения окажется чересчур высокой, и агрегат выйдет из строя.
С параллельно-последовательным (смешанным) возбуждением
Существует два вида схемы:
- основная обмотка индуктора включена параллельно с якорной, вспомогательная — последовательно;
- основная обмотка индуктора включена последовательно с якорной, вспомогательная — параллельно.

Схемы систем возбуждения МПТ
Подключение параллельной обмотки до последовательной называют «коротким шунтом», за последовательной — «длинным шунтом». Генераторы этого типа применяются крайне редко.
Двигатели сочетают в себе достоинства аналогов с параллельным и последовательным возбуждением: способны работать на холостом ходу и при этом развивают значительное тяговое усилие. Но и они сегодня почти не применяются.
Вычисление положения
Генерирование импульсов происходит в управляющей системе после сигнала, отражающего положение ротора. От стремительности вращения мотора напрямую зависит степень напряжения и подачи. Датчик в стартере определяет положение ротора и подает электрический сигнал. Вместе с магнитными полюсами, проходящими рядом с датчиком, меняется амплитуда сигнала. Также существуют бездатчиковые методики установления положения, к их числу относятся точки прохождения тока и преобразователи. ШИМ на входящих зажимах обеспечивают сохранение переменного уровня напряжения и управление мощностью.
Для ротора с неизменными магнитами подведение тока необязательно, благодаря чему отсутствуют потери в обмотке ротора. Бесщеточный двигатель для шуруповерта отличается низким уровнем инерции, обеспечиваемым отсутствием обмоток и механизированного коллектора. Таким образом появилась возможность использования на высоких скоростях без искрения и электромагнитного шума. Высокие значения тока и упрощение рассеивания тепла достигаются размещением нагревающих цепей на статоре. Стоит также отметить наличие электронного встроенного блока на некоторых моделях.

Осуществление переключения и контроля двигателей
Данная разновидность двигателей имеет два режима: они могут быть включёнными, либо отключёнными. Такое переключение делается переключателями, реле, транзисторами или же МОП-транзисторами.
В схеме управления используется биполярный транзистор, он играет ключевую роль в переключении режимов.
Контроль скорости двигателя
Потому как скорость данной разновидности двигателей является пропорциональной напряжению на клеммах, можно использовать транзистор для регулирования напряжения на них. Эти два транзистора подключены как пара для управления током главного ротора.
Будет интересно Что такое асинхронный двигатель и принцип его действия
Регулировка скорости импульса
Скорость вращения данной разновидности электрических двигателей является пропорциональной среднему давлению на второй клемме.
Изменение направления движения двигателя постоянного тока
Есть много преимуществ в управлении скоростью данной разновидности электрических двигателей, но есть один большой недостаток: направление вращения всегда одно и то же. Во многих случаях машина действует по простому принципу, чтобы двигаться вперед и назад. H-мостовая схема двигателя.
Базовая конфигурация четырех переключателей, будь то электромеханические реле или транзисторы, аналогична букве Н с двигателем, расположенным на шине посередине.
Как отремонтировать стартер автомобиля УАЗ-3151, -31512, -31514, -31519
Снимаем стартер, как описано в предыдущей статье

Откручиваем ключом на 13 гайку крепления силового провода к тяговому реле и отсоединяем наконечник провода


Отверткой откручиваем два винта крепления тягового реле и снимаем тяговое реле


Снимаем сердечник со штоком
Откручиваем два винта крепления крышки


Поддеваем отверткой, снимаем стопорное полукольцо и снимаем шайбу


Откручиваем ключом на 10 две гайки крепления и снимаем заднюю крышку

Сдвигаем корпус со шпилек


Ключом на 10 откручиваем гайку и отверткой откручиваем ось рычага


Снимаем со шпилек изоляционные трубки
Вынимаем якорь из передней крышки


Опираем ось якоря на деревянный брусок, через накидной ключ на 13 сбиваем упорную втулку
Поддеваем отверткой и снимаем пружинное кольцо


Снимаем с якоря упорную втулку и привод в сборе (бендикс) и промежуточную опору
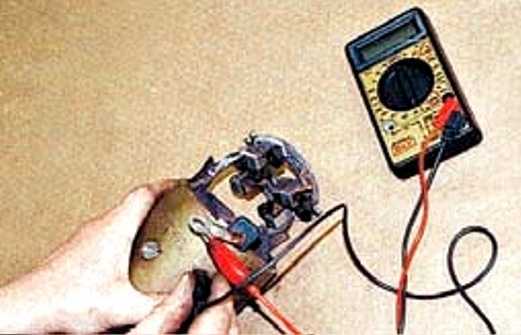
Омметром проверяем отсутствие замыкания обмоток статора на корпус
На исправном статоре сопротивление будет приближаться к бесконечности
Дефекты обмоток якоря определяем визуально – места замыканий или пробоев на «массу» чернеют.
Коллектор не должен иметь следов обгорания и сильного износа.
Перед сборкой сжатым воздухом удаляем угольную пыль из корпуса и щеткодержателя.
Собираем стартер в обратной последовательности, смазав втулки и детали привода тонким слоем смазки ФИОЛ-1 или моторным маслом.
Упорную втулку надеваем на вал так, чтобы конусная проточка была обращена в сторону канавки под пружинное кольцо
Далее, ставим на место пружинное кольцо, напрессовываем на него втулку ударом молотка через ключ «на 14» или поджимаем раздвижными пассатижами
Собрав стартер, подаем на вывод обмотки тягового реле +12 В от аккумуляторной батареи, а на корпус — «минус»


Измеряем штангенциркулем зазор между шестерней привода и упорной втулкой
Вращаем ось рычага отверткой и выставляем зазор 3-5 мм
Затягиваем гайку оси рычага и отсоединяем провода

Измеряем расстояние от торца шестерни привода до привалочной плоскости стартера, которое должно быть не более 34 мм
При необходимости регулировку повторяем
Замена реле включения стартера
Отключаем минусовую клемму аккумулятора

Под капотом крестовой отверткой откручиваем винт крепления реле к перегородке моторного отсека
Винт дополнительно крепит наконечник провода «массы»
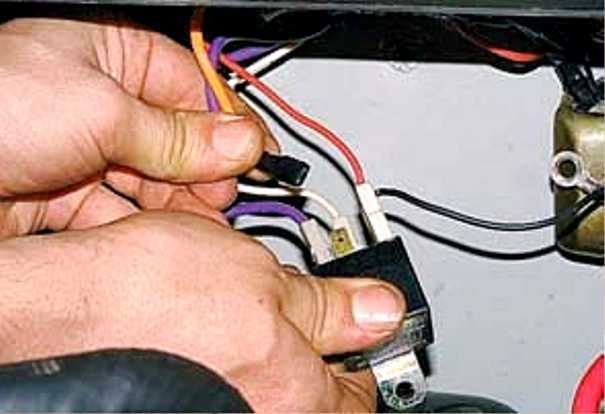
Помечаем провода, подсоединенные к реле
Снимаем наконечники проводов с выводов реле
Подсоединяем провода к новому реле и крепим его к панели кузова
Источник
Уравнение вращающих моментов
Если все члены уравнения (2) разделить на угловую скорость вращения якоря
Ω = 2 × π × n
то получим уравнение вращающих моментов для установившегося режима работы:
| (3) |
Здесь
| (4) |
представляет собой приложенный к валу вращающий момент первичного двигателя,
| (5) |
– электромагнитный момент, развиваемый якорем, и
| (6) |
– тормозной момент, соответствующий потерям на трение (Мтр) и магнитным и добавочный потерям (Мс.д), которые покрываются за счет механической мощности.










В неустановившемся режиме, когда скорость вращения изменяется, возникает также так называемый динамический момент вращения
| (7) |
где J – момент инерции вращающихся частей генератора. Динамический момент соответствует изменению кинетической энергии вращающихся масс. При увеличении скорости вращения момент Mдин > 0 и, как и момент M0 + Mэм, являются тормозным. В данном случае кинетическая энергия вращающихся масс увеличивается за счет работы первичного двигателя. Если момент Mдин < 0, он действует в направлении вращения и является движущим, поддерживая вращение за счет уменьшения кинетической энергии вращающихся масс.
Таким образом, в общем случае, при n ≠ const,
| (8) |
Момент
| Mст = M0 + Mэм | (9) |
соответствующий статическим силам, называют статическим моментом. Поэтому можно также написать
| Mв = Mст + Mдин | (10) |
Новое поколение систем питания тормозов постоянного тока
Система PS–1 была построена на базе техники полупроводников типа MOSFET, что позволило получить эффекты, недостижимые в традиционных решениях. Электромагнит тормоза, питаемый посредством системы такой же конструкции, позволяет получить тормозом параметры времени включения и отключения аналогичные в случае прерывания контура по стороне постоянного тока. Полученные параметры однако не требуют применения дополнительных электрических контуров и выключателей.
Простота монтажа и получаемые параметры обеспечивают очень широкое применение, особенно там, где требуется позиционирование приводов, работа с большой частотой соединений, обусловленная повторяемостью времени включения и отключения тормозов.
Система питания PS–1 представляет собой готовый узел для непосредственного монтажа. Оснащенная в 4-ех зажимную планку позволяет на свободное приспособление в каждом совместно работающем контуре. Система приспособлена для питания из источника переменного тока величиной 380 — 400VAC, макс. 420VAC, что после выпрямления и соответствующего сформирования позволяет получить постоянное напряжение величиной 170-180VDC для питания тормоза.
Прилагаемая ниже схема представляет способ включения системы PS-1 в контур питания тормоза совместно работающего с электродвигателем 3x380VAC с обмоткой соединенной в звезду.
Система PS-1
Электромагнит тормоза, питаемый выпрямителем такой конструкции, позволяет получить такие же параметры времени включения и выключения, как и в случае прерывания контура традиционным выпрямителем при постоянном токе. Полученные параметры однако не требуют применения дополнительных электрических контуров и выключателей.
Это обеспечивает очень широкое применение, особенно там, где требуется позиционирование приводов, работа с большой частотой соединений, обусловленная повторяемостью времени включения и отключения тормозов.
Система питания PS–1 представляет собой готовый узел для непосредственного монтажа. Выпрямитель принимает входное напряжение 220 — 230 VAC, макс. 250 VAC, что после выпрямления дает постоянное напряжение величиной 190-205 VDC.
Представленные выше конструкционные решения тормозов и самотормозящих электродвигателей не исчерпывают всех решений узла: двигатель — тормоз. В настоящем мы сконцентрировались направленные на представлении основного офертного предложения и применения, связанного с их питанием. Здесь мы представили лишь существо решений, применяемых обычно в нашей фирме.
Способы возбуждения машин постоянного тока
Согласно третьему закону электромеханики все электрические машины обратимы. Иначе говоря, они могут работать и как генератор, и как двигатель. Этой способностью электрические машины выгодно отличаются от других преобразователей энергии. Например, от дизельных двигателей или двигателей внутреннего сгорания. Ярким примером работы электромашины в разных режимах является двигатель электровоза. При движении электровоза его двигатель забирает электроэнергию из сети, как и любой другой электродвигатель. Но при торможении он наоборот отдает электроэнергию в сеть. То есть, работает в генераторном режиме.
Электрические машины постоянного тока тоже не являются исключением из этого правила. К примеру, если по обмоткам возбуждения и якоря пропустить постоянный ток, то ротор будет вращаться. (Чем отличается ротор от якоря можно прочитать здесь .) То есть, электрическая машина постоянного тока в данном случае будет электродвигателем.
Однако, если к обмотке возбуждения подключить источник постоянного тока и при этом вращать ротор, то в обмотке якоря создается переменная ЭДС. Иначе говоря, по обмотке якоря начинает протекать переменный электрический ток . Это ток снимают посредством проводников с щетками подключенными к контактным кольцам ротора. Если контактные кольца заменить полукольцами, то появляется возможность снимать выпрямленный электрический ток. То есть, в этом случае электромашина постоянного тока будет работать в режиме генератора.
Наличие магнитного поля позволяет обеспечивать работу электрических машин. Обычно магнитное поле у машин постоянного тока создается обмоткой возбуждения. Разумеется, что обмотка возбуждения питается постоянным током. От того, каким образом подключается в цепь обмотка возбуждения, по большому счету зависят основные свойства машины постоянного тока. Иначе говоря, электрические машины постоянного тока подразделяются по способу возбуждения.
1) Электрические машины постоянного тока последовательного возбуждения. То есть, это такие машины, у которых обмотка возбуждения и обмотка якоря соединяются последовательно. Двигатель постоянного тока, у которого обмотки подключены подобным образом может выдерживать перегрузки. Потому как даже при небольшом увеличении силы тока в якоре вращающий момент на валу сильно возрастает.
2) Электрические машины постоянного тока с параллельным возбуждением. Иначе говоря, в таких машинах обмотка якоря и обмотка возбуждения соединяются параллельно. У двигателей постоянного тока с подобным подключением обмоток скорость вращения мало изменяется при изменении механической нагрузки на валу.
3) Электрические машины постоянного тока со смешанным возбуждением. В таких машинах имеются две обмотки возбуждения. Одна из обмоток возбуждения подключается последовательно с обмоткой якоря. Другая обмотка возбуждения включается параллельно с обмоткой якоря. У двигателей с таким подключением обмоток существует умеренная зависимость скорости вращения от силы тока в обмотке якоря.
Для генераторов с железными статорами
Если зазор между статором и магнитами около 1 мм
Толщина магнитов 2 мм
0.4 Тл
0.5 Тл
Толщина магнитов 3 мм
0.5 Тл
0.7 Тл
Толщина магнитов 4 мм
0.7 Тл
0.8 Тл
Толщина магнитов 5 мм
0.9 Тл
1.0 Тл
Толщина магнитов 8 мм
1.1 Тл
1.2 Тл
Толщина магнитов 10 мм
1,2 Тл
1.4 Тл
Для аксиальных генераторов есть некоторые особенности. При расчёте нужно учитывать те витки катушек фазы, которые попадают под магниты. При этом если магнит шире половины катушки или даже перекрывает её полностью то считаются витки катушки как они есть. Но если на катушки фазы приходится по два магнита, которые встают так что один магнит перекрывает одну половину катушки, а второй магнит противоположным полюсом перекрывает вторую половину катушки, то напряжение этой катушки будет в два раза больше. Это происходит из-за того что ЭДС половинок катушки складывается и в результате напряжение катушки будет в два раза выше. И это надо учитывать в формуле, где можно тогда указать или магнитную индукцию в два раза выше, или количество витков умножить на 2. Чтобы понять как будут магниты перекрывать катушки нужно нарисовать расположение магнитов и катушек. Бывает так что один магнит перекрывает половину катушки, а второй перекрывает только половину витков второй половины катушки, в этом случае будет работать в определённый момент времени только одна половина катушки, и половина витков второй половины катушки. Эти факторы сильно влияют на конечный результат расчёта, и в итоге на реальный генератор.
Для примера я нарисовал схему обычного и часто повторяемого аксиального дискового генератора. Здесь 9 катушек на 12 пар магнитов, кто то делает на круглых магнитах, кто то на прямоугольных, а что лучше вы должны понять сами. Не скажу что так делать правильно, но давайте разберём то что есть.
Данные генератора такие: Диаметр дисков 32 см, магниты марки N52, по 12 штук на дисках, размером 50*30*10 мм, расстояние между магнитов — воздушный зазор 15 мм. Катушки намотаны проводом 2 мм по 60 витков, толщина статора 10 мм. Какое напряжение будет у этого генератора, и какая мощность при работе на аккумулятор?

>
Для начала давайте найдём ЭДС одного витка, то-есть его напряжение при 1 об/с = 60 об/м.
Е = BLV
Е — ЭДС индукции (напряжение проводника) В — магнитная индукция (Тл) L — длина проводника (метр) V — скорость движения проводника (метр/с)
Берём примерную магнитную индукцию из таблицы, у нас зазор между магнитов на 50% больше толщины магнитов, значит магнитная индукция будет примерно 0.5 Тл. Активная длина проводника у нас по высоте магнита, это 50 мм, или 0.05 метра. Скорость движения проводника, в данном случае движутся магниты, поэтому считаем скорость движения магнитов. Берём средний диаметр по магнитам, он равен 28 см, длина окружности 87.96 см. Значит за один оборот магниты проходят 0.88 метра.
Данны есть и теперь остаётся подставить их в формулу: 0.5*0.05*0.88=0.022 вольта, это ЭДС одного витка
Теперь смотрим на рисунок выше и смотрим как магниты перекрывают катушки фазы. Я отметил одну фазу на рисунке и пронумеровал катушки. Смотрим на катушку номер 1. Видно что половина катушки перекрыта магнитом N, и лишь половина второй половины катушки перекрыта магнитом S. Вот эти витки и нудно учитывать при расчёте, то-есть 60 витков одной половины катушки и 30 витков второй половины.
Смотрим на катушку фазы номер 2, там одна половина полностью перекрыта магнитом, а вторая не полностью, порядка 80%. Значит всего витков будет 60 одной половины и 50 витков второй половины.
Смотрим на катушку фазы номер 3, Там перекрытие магнитами витков порядка 90%, это значит что 100 витков примерно работают в обеих половинах катушки. Витки в обеих половинах катушки работают только когда над половинками катушки магниты противоположных полюсов. Если будет один магнит, и он перекрывает всю катушку, то будет работать только половина катушки, и то в тот момент когда магнит на половину зайдёт на катушку.
В итоге получилось 280 рабочих частей витков катушек фазы. Это значит что при 60 об/м будет 280*0.022=6.16 вольта
. То-есть мы вычислили напряжение фазы, и это напряжение линейно зависит от оборотов, значит при 600 об/м будет 61.6 вольта. А зарядка АКБ 12в начётся при 120 об/м при параллельном соединении фаз, которые должны быть предварительно выпрямлены через диодные мосты.
Но у нас обычно генераторы соединяют звездой. А при соединении звездой напряжение обычно вырастает на 1,7, но в реальном генераторе нужно смотреть на то какое напряжение в соседней фазе. Но обычно оно так и получается, поэтому оставим это на погрешности и будем считать что так оно и есть. 3начит при соединении звездой при 60 об/м мы получим 6.16*1.7=10.4 вольта
Регулирование частоты вращения
Регулирование скорости – это целенаправленное изменение скорости электродвигателя в принудительном порядке при помощи специальных устройств или приспособлений. Оно позволяет обеспечить оптимальный режим работы механизма, его рациональное использование, а также уменьшить расход энергии.
Существует три основных способа регулирования скорости двигателя:
- Изменение магнитного потока главных полюсов. Осуществляется при помощи регулировочного реостата: при увеличении его сопротивления магнитный поток главных полюсов и ток возбуждения Iв уменьшаются. При этом увеличивается число оборотов якоря на холостом ходу, а также угол наклона механической характеристики. Жесткость механических характеристик сохраняется. Однако увеличение скорости может привести к механическим повреждениям агрегата и к ухудшению коммутации, поэтому не рекомендуется увеличивать частоту вращения этим методом более чем в два раза.
- Изменение сопротивления цепи якоря. К якорю последовательно подключается регулировочный реостат. Скорость вращения якоря уменьшается при увеличении сопротивления реостата, а наклон механических характеристик увеличивается. Регулировка скорости вышеуказанным способом:
- способствует уменьшению частоты вращения относительно естественной характеристики;
- связана с большой величиной потерь в регулировочном реостате, следовательно, неэкономична.
- Безреостатное изменение подаваемого на якорь напряжения. В этом случае необходимо наличие отдельного источника питания с регулируемым напряжением, например, генератора или управляемого вентиля.
Стартер Иж Ода
На автомобиле с двигателем УМПО-331 устанавливается стартер 421.3708. На автомобиле с двигателем ВАЗ-2106 применяется стартер 35.3708. Стартеры имеют практически одинаковую конструкцию, однако ни в сборе, ни подетально не взаимозаменяемы.
Стартер — четырехшеточный электродвигатель постоянного тока со смешанным возбуждением и с электромагнитным двухобмоточным тяговым реле.
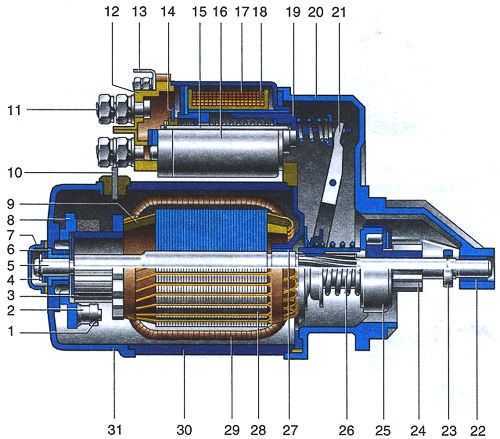
Стартер 421.3708 (ПРОДОЛЬНЫЙ разрез): 1 — пружина щетки; г — щеткодержатель щетки положительного вывода; 3 — коллектор; 4 — стопорная шайба; 5 — вал якоря; 6, 22, 27 — втулки (подшипники); 7 — колпак; 8 — траверса; 9 — обмотка якоря стартера; 10 — вывод обмотки возбуждения; 11 — контактный болт; 12-крышка реле; 13-контакт реле; 14-контактная пластина; 15-стержень якоря; 16-тяговое репе; 17 — втягивающая обмотка; 18-удерживающая обмотка; 19 — якорь реле; 20 — передняя крышка стартера; 21 — рычаг включения шестерни привода; 23 — ограничительное кольцо; 24 — шестерня привода маховика коленчатого вала; 25 — привод (обгонная муфта); 26 — пружина; 28 — якорь стартера; 29 — катушка обмотки возбуждения; 30 — корпус стартера; 31 — задняя крышка.









Техническая характеристика стартера 421 .3708
| Номинальная мощность, кВт | 1,65±10% |
| Потребляемый ток в режиме холостого хода, А, не более | 75 |
| Потребляемый ток в режиме полного торможения. А, на более | 520 |
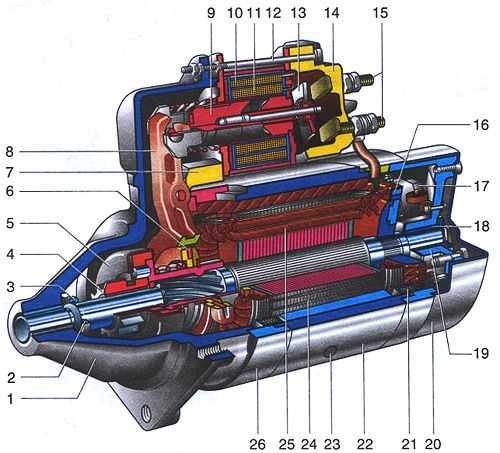
Стартер 35.3708 В сборе: 1 — крышка со стороны привода; 2 — стопорное кольцо; 3 — ограничительное кольцо; 4 — шестерня привода; 5 — обгонная муфта; б — поводковое кольцо; 7 — резиновая заглушка; 8 — рычаг привода; 9 — якорь реле; 10 — удерживающая обмотка тягового реле; 11 — втягивающая обмотка тягового реле; 12 — стяжной болт репе; 13 — контактная пластина; 14 — крышка реле; 15 — контактные болты; 16 — коллектор; 17 — щетка; 18 — втулка вала якоря; 19 — крышка со стороны коллектора; 20 — кожух; 21 — центовая катушка обмотки статора; 22 — корпус; 23 — винт крепления полюса статора; 24 — якорь; 25 — обмотка якоря; 26 — промежуточное кольцо.
Техническая характеристика стартера 35.3708
| Номинальная мощность, кВт | 1,3 |
| Потребляемый ток при максимальной мощности, А, не более | 290±10 |
| Потребляемый ток в режиме холостого хода. А. не более | 60 |
| Потребляемый ток е режиме полного торможения, А, не более | 550 |
В корпусе стартера винтами закреплены четыре полюса с обмотками возбуждения: тремя сериесными (последовательными) и одной шунтовой (параллельной). Корпус стартера 421.3708 вместе с крышками стянут двумя шпильками, а якорь вращается в трех бронзографитовых подшипниках, закрепленных в передней и задней крышках корпуса и промежуточной опоре. Корпус стартера 35.3708 вместе с крышками стянут двумя болтами, а якорь стартера имеет торцевой коллектор и вращается в двух металлокерамических подшипниках.
На валу привода установлена муфта свободного хода (обгонная муфта) с приводной шестерней. Она передает крутящий момент только в одном направлении — от стартера к двигателю, разобщая их после пуска двигателя. Это необходимо для защиты якоря стартера от повреждения из-за чрезмерной частоты вращения.
Тяговое реле служит для ввода шестерни привода в зацепление с зубчатым венцом маховика коленчатого вала двигателя и включения питания электродвигателя стартера. При повороте ключа в положение «стартер» напряжение через дополнительное реле типа 113.3747-10 подается на втягивающую и удерживающую обмотки тягового реле. После замыкания контактов тягового реле втягивающая обмотка отключается.
Напряжение срабатывания тягового реле должно быть не более 9 В при (20±5)°С. Если оно выше, реле или привод неисправны. Исправность привода определяется при осмотре после разборки стартера. Неисправное реле заменяют.

Схема соединений стартера: 1 — аккумуляторная батарея; 2 — реле включения стартера; 3 — монтажный блок; 4 — выключатель зажигания; 5 — стартер.
Видео про «Стартер» для Иж Ода
Иж-2717(ваз-2107;04;05) замена стартера на дороге
Снятие стартера двигателя с ваз
Стартер КЗАТЭ 35.3708-01 ИЖ 2126
СТ362А 12В/0,9кВт (ан.362.3708, 925.3708)` Стартер редукторный, пускового двигателя ПД-10;—16У;-350. МТЗ-, Т-, ДТ-, ДС-113, комбайны (АТЭ-1)
- Отправка транспортными компаниями («Деловые линии», ТК «КИТ»)
- Почта России.
- Самовывоз.
- Любой другой транспортной компанией или службой экспресс доставки.
Доставки по г. Екатеринбургу и пригородам НЕТ.
- Наличный расчет.
- На расчетный счет Сбербанка РФ из любого банка.
- На карту Сбербанка с банковской карты через Личный Кабинет СБ, терминалы СБ или отделения СБ.
| характеристика | значение |
|---|---|
| Диаметр, мм | 232 |
| Длина стартера, мм | 230 |
| Изготовитель/Торговая марка | АТЭ-1 |
| Модуль, мм | 2,5 |
| Мощность, кВт | 0,90 |
| Направление вращения | Правое |
| Напряжение, В | 12 |
| Особенности | редукторный |
| Число зубьев | 9 |
| Вес | 4,35 кг |
| Страна | КНР |
Редукторный стартер СТ 362А пускового двигателя ПД-10; ПД-16У; ПД-350
Применяатся на: тракторах: Т-4, -4А; Т-150,-155, -156; ДТ-75, -75М,-75МЛ; ДС-113; МТЗ-50Л, -50, -52Л, -80; ТДТ-55, комбайнах «Колос-6″, Сибиряк», КС-6 —>
Цены сайта не являются публичной офертой.
Заметили неточность или ошибку в описании — пожалуйста, сообщите нам !
Источник

